サーボモーターとは何か?仕組みや種類、用途などを紹介
2025年5月26日更新
この記事を書いた人

大手メーカー「コマツ」、「オムロン」などで7年間、アナログ回路エンジニアとして設計・評価業務に従事。
ECU、PLCなどのエレキ開発経験を多数持つほか、機械商社での就労経験も有する。
株式会社アイズ運営の機電系フリーランスエンジニア求人情報「FREEAID」専属ライターとして、
機電分野の知識と実務経験を活かし、専門性の高い記事執筆を行っている。
サーボモーターは、精密な動作制御を行うための部品として、主に産業用で幅広く用いられています。本記事では、サーボモーターの仕組みや構造など、利用する上で知っておきたい基礎知識を解説します。
サーボモーターとは?
サーボモーターとは「サーボ機構」を実現するモーターとして名付けられました。サーボ機構とは、位置や速度、トルクが指示した通りになるよう、自動で動作制御を行い、誤差を補正してくれる機構のことです。通常のモーターは、一定の回転数で連続運転するために使われますが、例えば一定の角度だけ回転させて止めるなど、精密な操作を行うのには向いていません。
一方、工作機械やロボットなどの産業機器では、多くの場合細かな位置・角度制御が必要となるため、不具合なく制御を行うためにサーボモーターが使われています。また、産業用途では過酷な環境下で細かく動作・停止を繰り返すため、サーボモーターは通常のモーターより高い信頼性・耐久性を有しています。
サーボモーターの仕組み
サーボ機構においては、自身の状態を検知して適切に制御を行うため、モーター以外にもさまざまな装置が必要となります。主に使われる装置は以下の通りです。
| 装置名 | 機能 |
|---|---|
| コントローラ | プログラム通りにモーターが動くよう、指令を出す装置 |
| サーボアンプ(ドライバー) | 供給された電源の電圧・周波数などを変換し、コントローラの指令通りにモーターを動かす装置 |
| エンコーダー | モーターの回転角度・速度を検知し、サーボアンプにフィードバック情報を伝える装置 |
これらの装置によってフィードバック制御を行い、精密なモーター駆動を実現しています。それでは、実際の動作の流れをお伝えしましょう。まず、コントローラにプログラムを入れることで、目標となる角度や回転数をモーターに指示します。コントローラから指示を受けたサーボアンプは、電源電圧・周波数を制御してモーターを動かします。
これだけでは、実際にモーターが指示通りに動いているか分かりません。そこで、エンコーダーがモーターの動作状況を読み取り、フィードバック信号をサーボアンプに送ります。情報を受け取ったサーボアンプは、目標と実際の動作を比較して誤差を読み取り、モーターに新しい制御信号を送るのです。
このフィードバック信号を何度も参照し誤差を修正することで、最終的に目標値と一致する高精度な制御が行えることとなります。
サーボモーターの種類
サーボモーターは、用いる電源の違いからDCモーターとACモーターの2種類に分類されます。それぞれの特徴について解説します。
DCモーター
DCモーターは、直流電源を使って動作するモーターのことです。回転子(ローター)をコイルで構成し、周りに固定子(ステーター)として永久磁石を配置した構造になっています。永久磁石は、ローターを挟む形でS極とN極を置き、一方向の磁場を作るために使われます。この状態でローターのコイルに直流電源を流すと、ローターはフレミングの法則により、磁場から力を受けて回転することとなるのです。
ただ、コイルが反転すると、受ける力の方向が逆になってしまい回転が止まるので、反転するごとに電流の向きを変える「ブラシ」という機構が付いています。DCモーターは構造が非常にシンプルで、高速回転・高効率なモーターを作れるというメリットがあるため、従来はモーターの主力として用いられてきました。しかし、ブラシが回転と共に摩耗するという弱点があるため、最近は摺動部品のないACモーターに置き換えられつつあります。
ACモーター
ACモーターは、ローターを導体で作り、ステーターにコイルを取り付けて交流電流を流すことで、回転力を生み出すモーターです。導体を挟む形で磁界を作り、その磁界を移動させると導体がつられて動くという仕組みを利用しています。ステーターには4つ以上のコイルを配置し、各コイルに電流を流すタイミングを変えることで、磁石が回転するのと同じ回転磁界を発生させることができます。その回転磁界により、導体であるローターがつられて回転するのが原理です。
ACモーターの構造は、コイルに電流を流すタイミングを精密に制御する必要があり、速度制御などが技術的に難しいという課題があります。しかし、ローターに摺動部品がなくメンテナンスの必要がないことが大きなメリットであり、現在はDCモーターの代替として幅広く使われています。
ステッピングモーターとの違い

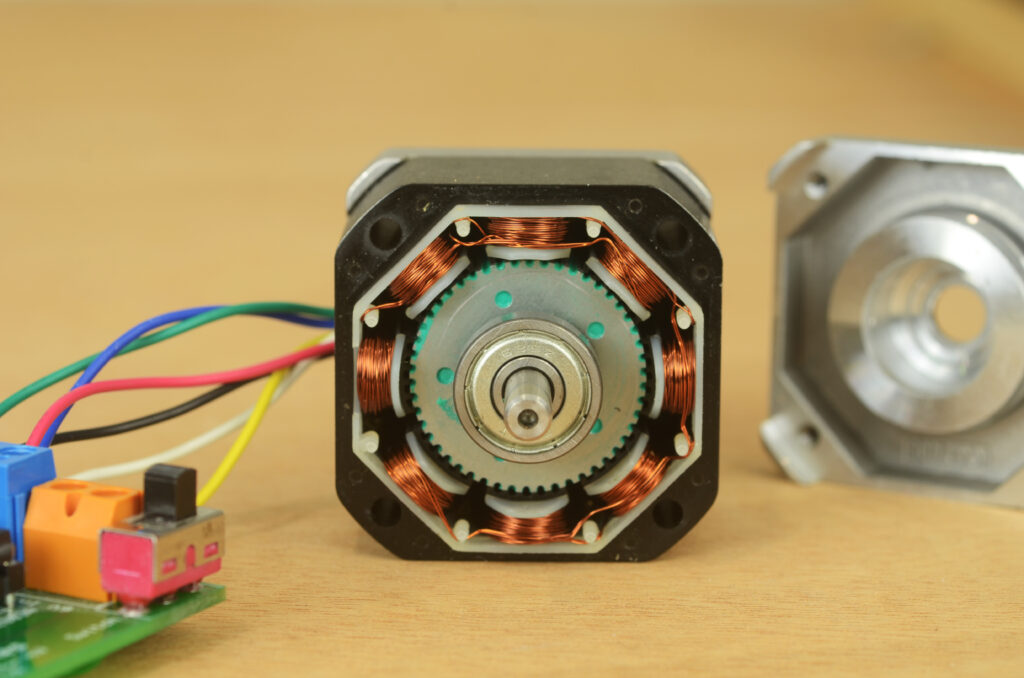
Stepper motor, disassembled, on white
サーボモーターと似た部品として「ステッピングモーター」も有名ですが、サーボモーターとは動作原理が異なるため、違いを紹介しておきましょう。ステッピングモーターとサーボモーターの大きな違いは「フィードバック機構がないこと」です。ステッピングモーターは、パルス信号を入力することで、時計の針のように一定角度でモーターを回転させます。
パルス数で角度を調整するため、フィードバック回路がなくとも正確に角度変化を出力できるのです。機構がシンプルなので壊れにくく、応答速度も速いといったメリットがあります。一方、故障などでパルス入力と出力が同期しない場合に補正が掛けられないほか、高トルクの制御に向いていないといった短所もあります。
サーボモーターの用途
サーボモーターは利用範囲が広く、ほぼ全ての業界で使われていますが、特に代表的な用途について解説します。
産業用途
サーボモーターが最も数多く使われるのは、産業用途です。特に、工作機械やロボット、半導体・液晶製造など、超精密な位置・角度制御が求められる装置では必ず使われます。以下に使用例を示します。
- ・産業用ロボットの間接部
- ・高精度位置決め用テーブル
- ・搬送用ベルトコンベア
- ・自動ドアの開閉装置
- ・ボトルキャップのねじ切り機構
- ・プレス機(サーボプレス)
ホビー業界
次にサーボモーターが多く使われているのはホビー業界です。ラジコンや2足歩行ロボットなど、遠隔操作する玩具には必ずといっていいほどサーボモーターが使われています。
似た用途として、クレーンゲームに使われるロボットアームなどにも、サーボモーターが用いられます。
まとめ
今回は、サーボモーターの仕組みや特徴、種類などについてお伝えしました。サーボモーターはフィードバック信号を用いることで、精密な位置・角度制御が行えるモーターのことです。モーターの動作を細かく制御したい場合は、サーボモーターが欠かせません。設計を行う際は、動作原理を正しく理解して、性能を十分に活かせるようにしておきましょう。
フリーランス×機電系エンジニア!高単価求人はこちら ▶


この記事の運営元:株式会社アイズ
「アウトソーシング」「ビジネスソリューション」「エンジニアリング」「ファクトリーオートメーション」の4つの事業を柱に、製造業やICT分野の課題解決を力強くサポートします。
フリーランスの機電系エンジニア求人情報サイト「FREE AID」を運営しています。
 機電系求人はこちら
機電系求人はこちら
設計技術者(樹脂、金属部品)
- 単価
40~50万円
- 職種
- 機械設計
- 詳細を見る
FPGAの設計開発:電気電子設計
- 単価
70~80万円
- 職種
- 電気電子設計
- スキル
- ・FPGA論理設計、RTLコーディング、論理検証環境構築、論理検証・RTLコード:VHDL・論理検証ツール:Siemens製Questa/ModelSIM
- 地域
- 東京
- ポイント
- #高単価
- 詳細を見る
UI画面の設計業務:電気電子設計
- 単価
64〜万円
- 職種
- 開発
- 電気電子設計
- スキル
- 必要スキル: ・電源回路は複数回経験し、設計動作確認など、一人でもある程度やるべきことが分かる。 ・数十頁のデータシートを読み、要求仕様(タイミング/電圧など)が理解できる ・その他左記の回路の種類の中で、回路設計の実務経験が1回以上ある。 ・回路修正ができる(半田付け、ジャンパー処理)
- 地域
- 関西
- ポイント
- #業務委託#駅近
- 詳細を見る
【急募】工作機械メーカーにおける自社製品の制御設計
- 単価
40~50万円
- 職種
- 電気電子設計
- スキル
- 基本的なPCスキル産業用機械・装置の電気設計経験
- 地域
- 山梨県
- ポイント
- #業務委託
- 詳細を見る

